TOC
Personal Tips for Reading Paper
- Read Tables and Figures first: Most of the papers summarizes important findings on the tables and figures. Often times, most of the text on the papers are peripheral explication of such tables and figures.
- Read Methodology or Architecture before the Introduction: introduction 1) is either relatively repetetive or 2) summary of preceding research.
- Prior to reading the paper thoroughly, find which research are crucial to understand in the ongoing discourse in the Introduction part.
Personal Tips for Implementing Papers into Code
- Implement an experiment what seems to represent the novel findings of the paper. Implementing all of the experiments in the paper is nearly impossible without the help of the others.
- Open-source the code if and only if the paper is already open to the public. Most of the code requires refactoring. Being aware of the audience, public code under the personal authorship is more likely to be proofreaded again even without feedbacks from the others.
- Develop the official implementations or other people's implementations which are likely to be imperfect. Surprisingly, many of the official implementations lack details. This is probably because of lack of time for version management where private code remains covert.
Review on Very Deep Convolutional Networks for Large-Scale Image Recognition
Convolutional neural network's purpose is to extract representative features from the given input.
Historically, simply stacking up multiple blocks of [3 x 3 convolution, activation, max-pooling] to achieve desired performance was gargantuan contribution.
- Compared to prior neural networks, numbers of layers in VGG was considered to be "very deep". Convolutional layers + fully connected layers totaled 19 layers for VGG19. However, in the following year, numbers of layers shoots up to 152 layers in ResNet architecture.

-
Compared to GoogleNet, VGG's architecture was simple. Googlenet which acheived SOTA performance consisted of 1) inception modules and 2) intermediate classifier branches in the middle of the architecture.
Inception modules illustrated below uses heterogeneous sizes of convolutional layers, ranging from 1x1 to 5x5, which are concatenated at the end.

Moreover, GoogleNet had intermediate auxiliary classifier, represented as the yellow block in the diagram below, used during the training. The architecture was to highjack gradients before it vanishes(or explodes) when passing through layers, but the structure was less intuitive.

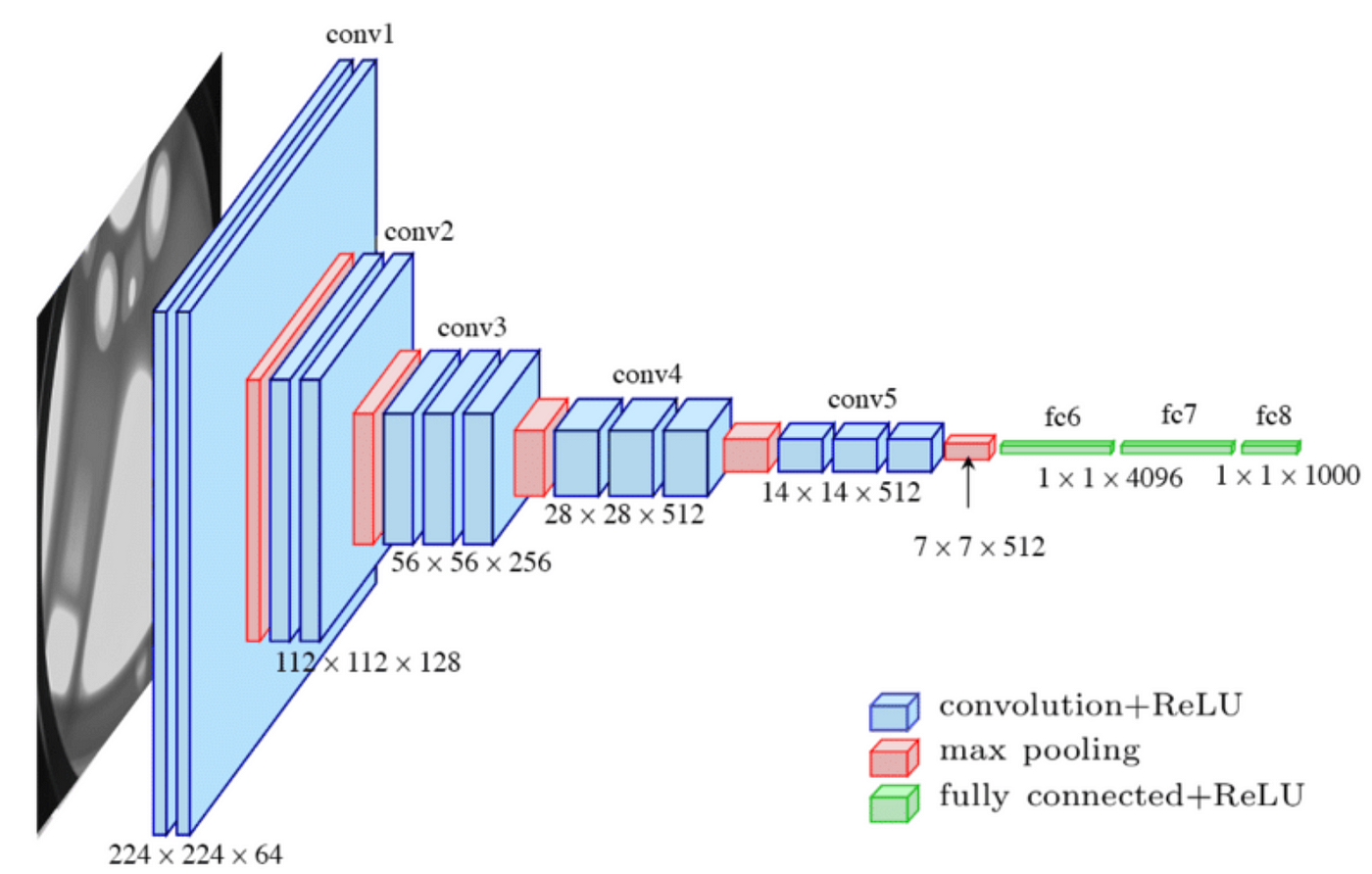
On the other hand, VGG is monotonous repetition of [3 x 3 convolution, activation, max-pooling] before the classifier.
Implementing VGG on ImageNet Subset
In order to replicate the experiment, ImageNet1K dataset should be used. However, ImageNet training dataset takes up more than 130GB of storage which makes it a great benchmark to compare between the models but a bad testing bed for trial and errors.
Thus for this blog post, 10 subset classes of ImageNet is used as the dataset. Imagenette Dataset by FastAI allows us to test the models on easy classification task(Imagenette) and difficult classification task(imagewoof). Former one is classifying distinctive classes of objects/animals and the latter one is classifying species of dog.
-
3 x 3 convolution is relatively small-sized filter.
- Small is good enough
- Better to stack up 3 x (3 x 3) than 1 x (7 x 7)
- Consequent max-pooling operations reduces resolution into half. e.g (224 x 224) -> (112 x 112)
# unzip .tgz file
# Subset of ImageNet: 1000 class -> 10 class and 130GB -> 300MB: https://github.com/fastai/imagenette
# !tar -xvzf /home/ubuntu/imagenet/imagenette2-320.tgz # easy classification task for 10 classes
# !tar -xvzf /home/ubuntu/imagenet/imagewoof2-320.tgz # hard classification task for 10 classesTrouble Encountered
-
Implemented VGG16 underperforms torchvision vgg16
- Top1 Acc 44% vs 9.7%
- Loss 2.3 vs 6.8
- Loss is reluctant to be updated as training progresses
AdaptiveAvgPool
- Why is there AdaptiveAvgPool at the torchvision implementation whereas none-existent in paper?
Weight Initialization
- Why initialization increases performance?
- Difference between each Weight Initialization methods
-
How to initialize weights in Pytorch
-> Slight performance increase to 10%
Batch normalization
- location of batch normalization?
- function of batch normalization?
- Why does batch normalization does not appear in torch summary?
- Why does batch normalization increase memory space of the model?
-> Batch normalization didn't make any differences
Weight vs Bias
- Difference between weight and bias
import torch
import torch.nn as nn # import basic components
import torch.nn.functional as F # import functions
from torchsummary import summary
# VGG16, Configuration D
class VGG16(nn.Module):
def __init__(
self,
dropout_ratio=0.5,
input_channels=3,
input_resolution=224,
num_classes=1000,
):
"""
VERY DEEP CONVOLUTIONAL NETWORKS FOR LARGE-SCALE IMAGE RECOGNITION
https://arxiv.org/pdf/1409.1556.pdf
- Implemented by @snoop2head and @lylajeon
- Implementation of Table 1's ConvNet D Configuration
- Each of the layers' output notated as channel@heightxwidth on the comments
"""
super(VGG16, self).__init__()
self.apply(self._initialize_weights)
# instantiate input variables as class attributes
self.dropout_ratio = dropout_ratio
self.input_channels = input_channels
self.input_resolution = input_resolution
self.num_classes = num_classes
# convolutional layers configuration
self.conv_size = (3, 3)
self.conv_stride = 1
self.conv_padding = 1
# max-pooling operations configuration
self.pool_size = (2, 2)
self.pool_stride = 2 # max pooling halves the image's resolution
self.num_pooling = 5 # number of max-pooling operations
# fully-connected layers configuration
self.final_conv_output_resolution = (
self.input_resolution // self.pool_stride ** self.num_pooling
)
self.fc_size = 4096
self.conv1 = nn.Sequential(
nn.Conv2d(
in_channels=self.input_channels,
out_channels=64,
kernel_size=self.conv_size,
stride=self.conv_stride,
padding=self.conv_padding,
), # 64@224x224
nn.ReLU(),
nn.Conv2d(
in_channels=64,
out_channels=64,
kernel_size=self.conv_size,
stride=self.conv_stride,
padding=self.conv_padding,
), # 64@224x224
nn.ReLU(),
nn.MaxPool2d(kernel_size=self.pool_size, stride=self.pool_stride),
) # 64@112x112
self.conv2 = nn.Sequential(
nn.Conv2d(
in_channels=64,
out_channels=128,
kernel_size=self.conv_size,
stride=self.conv_stride,
padding=self.conv_padding,
), # 128@112x112
nn.ReLU(),
nn.Conv2d(
in_channels=128,
out_channels=128,
kernel_size=self.conv_size,
stride=self.conv_stride,
padding=self.conv_padding,
), # 128@112x112
nn.ReLU(),
nn.MaxPool2d(kernel_size=self.pool_size, stride=self.pool_stride),
) # 128@56x56
self.conv3 = nn.Sequential(
nn.Conv2d(
in_channels=128,
out_channels=256,
kernel_size=self.conv_size,
stride=self.conv_stride,
padding=self.conv_padding,
), # 256@56x56
nn.ReLU(),
nn.Conv2d(
in_channels=256,
out_channels=256,
kernel_size=self.conv_size,
stride=self.conv_stride,
padding=self.conv_padding,
), # 256@56x56
nn.ReLU(),
nn.Conv2d(
in_channels=256,
out_channels=256,
kernel_size=self.conv_size,
stride=self.conv_stride,
padding=self.conv_padding,
), # 256@56x56
nn.ReLU(),
nn.MaxPool2d(kernel_size=self.pool_size, stride=self.pool_stride),
) # 256@28x28
self.conv4 = nn.Sequential(
nn.Conv2d(
in_channels=256,
out_channels=512,
kernel_size=self.conv_size,
stride=self.conv_stride,
padding=self.conv_padding,
), # 512@28x28
nn.ReLU(),
nn.Conv2d(
in_channels=512,
out_channels=512,
kernel_size=self.conv_size,
stride=self.conv_stride,
padding=self.conv_padding,
), # 512@28x28
nn.ReLU(),
nn.Conv2d(
in_channels=512,
out_channels=512,
kernel_size=self.conv_size,
stride=self.conv_stride,
padding=self.conv_padding,
), # 512@28x28
nn.ReLU(),
nn.MaxPool2d(kernel_size=self.pool_size, stride=self.pool_stride),
) # 512@14x14
self.conv5 = nn.Sequential(
nn.Conv2d(
in_channels=512,
out_channels=512,
kernel_size=self.conv_size,
stride=self.conv_stride,
padding=self.conv_padding,
), # 512@14x14
nn.ReLU(),
nn.Conv2d(
in_channels=512,
out_channels=512,
kernel_size=self.conv_size,
stride=self.conv_stride,
padding=self.conv_padding,
), # 512@14x14
nn.ReLU(),
nn.Conv2d(
in_channels=512,
out_channels=512,
kernel_size=self.conv_size,
stride=self.conv_stride,
padding=self.conv_padding,
), # 512@14x14
nn.ReLU(),
nn.MaxPool2d(kernel_size=self.pool_size, stride=self.pool_stride),
) # 512@7x7
# count number of nn.maxpool2d layers
self.fc_module = nn.Sequential(
nn.Linear(512 * self.final_conv_output_resolution ** 2, self.fc_size),
nn.Dropout(self.dropout_ratio),
nn.ReLU(),
nn.Linear(self.fc_size, self.fc_size),
nn.Dropout(self.dropout_ratio),
nn.ReLU(),
nn.Linear(self.fc_size, self.num_classes),
)
def forward(self, x):
# forward pass through convolutional layers
out = self.conv1(x)
out = self.conv2(out)
out = self.conv3(out)
out = self.conv4(out)
out = self.conv5(out)
# flatten the output
out = out.flatten(start_dim=1) # assuming batch size is first dimension
# forward pass through fully connected layers
out = self.fc_module(out)
# yield prediction probabilities for each class using softmax
return F.softmax(out, dim=1) # assuming batch size is first dimension
def _initialize_weights(self, module):
if isinstance(module, nn.Conv2d):
nn.init.kaiming_normal_(module.weight, mode="fan_out", nonlinearity="relu")
if module.bias is not None:
nn.init.constant_(module.bias, 0)
elif isinstance(module, nn.Linear):
nn.init.normal_(module.weight, 0, 0.01)
nn.init.constant_(module.bias, 0)from torchvision.models import vgg16
# Setting device
is_cuda = torch.cuda.is_available()
device = torch.device('cuda:0' if is_cuda else 'cpu')
print ('Current cuda device is', device)
# Both are VGG16, Configuration D
custom_vgg_model = VGG16()
torch_vgg_model = vgg16(pretrained=False) # pretrained=False for random initialization
print("--------------------Custom VGG16--------------------")
print(summary(custom_vgg_model.to(device), (3, 224, 224)))
print("--------------------Torch VGG16--------------------")
print(summary(torch_vgg_model.to(device), (3, 224, 224)))--------------------Custom VGG16--------------------
Layer (type) Output Shape Param #
================================================================
Conv2d-1 [-1, 64, 224, 224] 1,792
ReLU-2 [-1, 64, 224, 224] 0
Conv2d-3 [-1, 64, 224, 224] 36,928
ReLU-4 [-1, 64, 224, 224] 0
MaxPool2d-5 [-1, 64, 112, 112] 0
Conv2d-6 [-1, 128, 112, 112] 73,856
ReLU-7 [-1, 128, 112, 112] 0
Conv2d-8 [-1, 128, 112, 112] 147,584
ReLU-9 [-1, 128, 112, 112] 0
MaxPool2d-10 [-1, 128, 56, 56] 0
Conv2d-11 [-1, 256, 56, 56] 295,168
ReLU-12 [-1, 256, 56, 56] 0
Conv2d-13 [-1, 256, 56, 56] 590,080
ReLU-14 [-1, 256, 56, 56] 0
Conv2d-15 [-1, 256, 56, 56] 590,080
ReLU-16 [-1, 256, 56, 56] 0
MaxPool2d-17 [-1, 256, 28, 28] 0
Conv2d-18 [-1, 512, 28, 28] 1,180,160
ReLU-19 [-1, 512, 28, 28] 0
Conv2d-20 [-1, 512, 28, 28] 2,359,808
ReLU-21 [-1, 512, 28, 28] 0
Conv2d-22 [-1, 512, 28, 28] 2,359,808
ReLU-23 [-1, 512, 28, 28] 0
MaxPool2d-24 [-1, 512, 14, 14] 0
Conv2d-25 [-1, 512, 14, 14] 2,359,808
ReLU-26 [-1, 512, 14, 14] 0
Conv2d-27 [-1, 512, 14, 14] 2,359,808
ReLU-28 [-1, 512, 14, 14] 0
Conv2d-29 [-1, 512, 14, 14] 2,359,808
ReLU-30 [-1, 512, 14, 14] 0
MaxPool2d-31 [-1, 512, 7, 7] 0
Linear-32 [-1, 4096] 102,764,544
Dropout-33 [-1, 4096] 0
ReLU-34 [-1, 4096] 0
Linear-35 [-1, 4096] 16,781,312
Dropout-36 [-1, 4096] 0
ReLU-37 [-1, 4096] 0
Linear-38 [-1, 1000] 4,097,000
================================================================
Total params: 138,357,544
Trainable params: 138,357,544
Non-trainable params: 0
----------------------------------------------------------------
Input size (MB): 0.57
Forward/backward pass size (MB): 218.59
Params size (MB): 527.79
Estimated Total Size (MB): 746.96
----------------------------------------------------------------MINI_BATCH_SIZE = 256 # numbers of images in a mini-batch
VALID_BATCH_SIZE = 64 # numbers of images in a mini-batch
LEARNING_RATE = 1e-4
EPOCHS = 100
RESOLUTION = (224, 224)# import dataset structuring and image transformation modules
from torchvision.datasets import ImageFolder # Load dataset
from torchvision import transforms
DATA_PATH = "imagenette2-320"
imagenet_transforms = transforms.Compose([
transforms.Resize(RESOLUTION),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
])
train_data = ImageFolder(root=f'./{DATA_PATH}/train', transform=imagenet_transforms)
print('number of training data: ', len(train_data))number of training data: 9469valid_data = ImageFolder(root=f'./{DATA_PATH}/val', transform = imagenet_transforms)
print('number of test data: ', len(valid_data))number of test data: 3925sample_idx = 1001
sample_img, sample_label = train_data[sample_idx]
print('sample image shape: ', sample_img.size())
print('sample image label: ', sample_label)sample image shape: torch.Size([3, 224, 224])
sample image label: 1from matplotlib import pyplot as plt
# show image from training data
plt.imshow(sample_img.numpy().transpose(1,2,0))
plt.title(f'label is {sample_label}')
plt.show()Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).

# using torch dataloader to divide dataset into mini-batch
# https://pytorch.org/docs/stable/data.html
train_loader = torch.utils.data.DataLoader(
dataset = train_data,
batch_size = MINI_BATCH_SIZE,
shuffle = True
)
eval_loader = torch.utils.data.DataLoader(
dataset = valid_data,
batch_size = VALID_BATCH_SIZE,
shuffle = True
)
first_batch = train_loader.__iter__().__next__()
print('{:<21s} | {:<25s} | {}'.format('name', 'type', 'size'))
print('{:<21s} | {:<25s} | {}'.format('Number of Mini-Batchs', '', len(train_loader)))
print('{:<21s} | {:<25s} | {}'.format('first_batch', str(type(first_batch)), len(first_batch)))
print('{:<21s} | {:<25s} | {}'.format('first_batch[0]', str(type(first_batch[0])), first_batch[0].shape))
print('{:<21s} | {:<25s} | {}'.format('first_batch[1]', str(type(first_batch[1])), first_batch[1].shape))name | type | size
Number of Mini-Batchs | | 37
first_batch | <class 'list'> | 2
first_batch[0] | <class 'torch.Tensor'> | torch.Size([256, 3, 224, 224])
first_batch[1] | <class 'torch.Tensor'> | torch.Size([256])# bring optimizers from torch
import torch.optim as optim
# Hyperparameter Setting
model = custom_vgg_model.to(device)
# Defining optimizer
optimizer = optim.Adam(model.parameters(), lr = LEARNING_RATE)
# Using Cross entropy loss function
criterion = nn.CrossEntropyLoss()# Print model's architecture
print(model)VGG16(
(conv1): Sequential(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU()
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU()
(4): MaxPool2d(kernel_size=(2, 2), stride=2, padding=0, dilation=1, ceil_mode=False)
)
(conv2): Sequential(
(0): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU()
(2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU()
(4): MaxPool2d(kernel_size=(2, 2), stride=2, padding=0, dilation=1, ceil_mode=False)
)
(conv3): Sequential(
(0): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU()
(2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU()
(4): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(5): ReLU()
(6): MaxPool2d(kernel_size=(2, 2), stride=2, padding=0, dilation=1, ceil_mode=False)
)
(conv4): Sequential(
(0): Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU()
(2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU()
(4): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(5): ReLU()
(6): MaxPool2d(kernel_size=(2, 2), stride=2, padding=0, dilation=1, ceil_mode=False)
)
(conv5): Sequential(
(0): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU()
(2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU()
(4): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(5): ReLU()
(6): MaxPool2d(kernel_size=(2, 2), stride=2, padding=0, dilation=1, ceil_mode=False)
)
(fc_module): Sequential(
(0): Linear(in_features=25088, out_features=4096, bias=True)
(1): Dropout(p=0.5, inplace=False)
(2): ReLU()
(3): Linear(in_features=4096, out_features=4096, bias=True)
(4): Dropout(p=0.5, inplace=False)
(5): ReLU()
(6): Linear(in_features=4096, out_features=1000, bias=True)
)
)from tqdm import tqdm
""" Training the model """
# Change the model to training mode
model.train()
# A training step is one gradient update. In one step batch_size many examples are processed.
# training step = dataset size / mini-batch size
# https://stackoverflow.com/questions/38340311/what-is-the-difference-between-steps-and-epochs-in-tensorflow
# Updating Gradient in each training steps
for epoch in range(EPOCHS):
for training_step, (data, target_tensor) in enumerate(tqdm(train_loader)): # bringing dataset from train_loader() function
# data is [Batch Size = 50, Channel Size = 1, Height = 28, Width = 28] tensor
data = data.to(device)
# Tagets is label [Labels = 50] tensor
target_tensor = target_tensor.to(device)
# Gradient Descent process
optimizer.zero_grad() # initializing previously saved gradient's value to zero # https://jaeyung1001.tistory.com/115
output = model(data) # feed forward to get one-hot-encoded output probabilities
loss = criterion(output, target_tensor) # comparing prediction and ground truth to get loss
loss.backward() # backpropagating loss
optimizer.step() # updating weights with single optimization step
# print status every 1000 training steps
if training_step % 500 == 0:
loss_rounded_to_3 = round(loss.item() * 1000) / 1000 # loss is a single value, so we need to round it to 3 digits
print(f'Train Step: {training_step} \t Loss: {loss_rounded_to_3}') 3%|▎ | 1/37 [00:03<01:49, 3.03s/it]
Train Step: 0 Loss: 6.908
100%|██████████| 37/37 [00:56<00:00, 1.53s/it]
3%|▎ | 1/37 [00:02<01:26, 2.40s/it]
Train Step: 0 Loss: 6.792
100%|██████████| 37/37 [00:53<00:00, 1.46s/it]
3%|▎ | 1/37 [00:02<01:29, 2.50s/it]
Train Step: 0 Loss: 6.8
100%|██████████| 37/37 [00:53<00:00, 1.45s/it]
3%|▎ | 1/37 [00:02<01:29, 2.48s/it]
Train Step: 0 Loss: 6.773
78%|███████▊ | 29/37 [00:42<00:11, 1.44s/it]""" Evaluating the model """
# Switching to evaluation mode
model.eval()
correct = 0
for data, target_labels in tqdm(eval_loader):
# data is [Batch Size = 50, Channel Size = 1, Height = 28, Width = 28] tensor
data = data.to(device)
# Tagets is label [Labels = 50] tensor
target_labels = target_labels.to(device)
# getting predicted output label out of maximum probabilities' output in the tensor
output = model(data)
predicted_output_labels = output.data.max(1)[1]
# add numbers of correct predictions
correct += predicted_output_labels.eq(target_labels.data).sum()
print('Test set: Accuracy: {:.2f}%'.format(100. * correct / len(eval_loader.dataset)))100%|██████████| 62/62 [00:21<00:00, 2.84it/s]
Test set: Accuracy: 9.91%References
https://www.geeksforgeeks.org/understanding-googlenet-model-cnn-architecture/
